| [1] |
Leng B, Yu Y Z, Liu M, et al. Deep reinforcement learning-based drift parking control of automated vehicles[J]. Science China Technological Sciences, 2023, 66(4): 1152-1165.
|
| [2] |
张雷, 徐同良, 李嗣阳, 等. 全线控分布式驱动电动汽车底盘协同控制研究综述[J]. 机械工程学报, 2023, 59(20): 261-280.
DOI
|
|
Zhang L, Xu T L, Li S Y, et al. A review of collaborative control for fully wire-controlled distributed drive electric vehicle chassis[J]. Journal of Mechanical Engineering, 2023, 59(20): 261-280. (in Chinese)
|
| [3] |
2024年12月汽车智能网联洞察报告[R/OL]. [2025-02-21]. http://cpcaauto.com/newslist.php?types=csjd&id=3760.
|
|
2024 December automotive intelligent connectivity insights report[R/OL]. [2025-02-21]. http://cpcaauto.com/newslist.php?types=csjd&id=3760. (in Chinese)
|
| [4] |
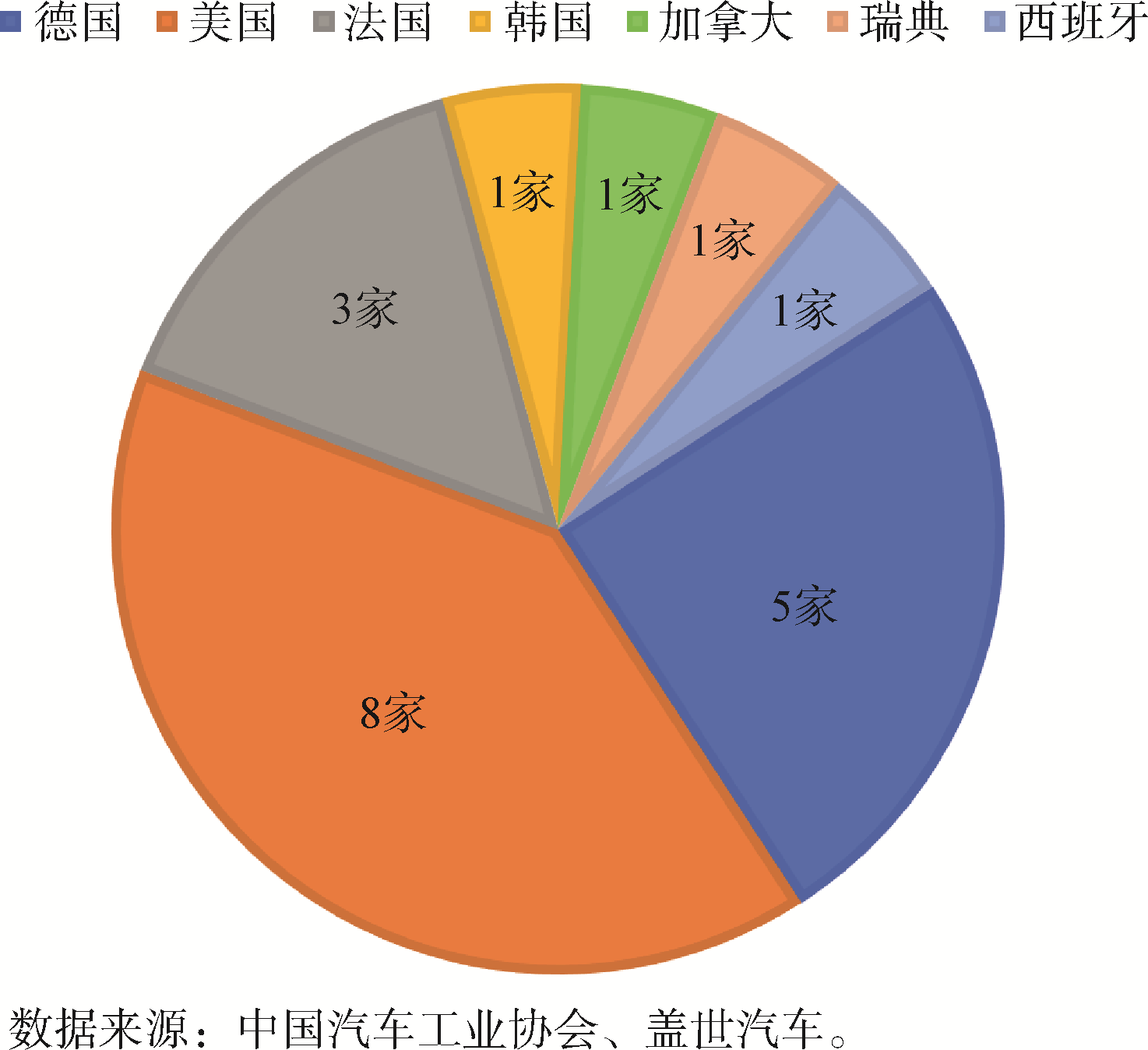
20家国际零部件企业2023年财报解读[R/OL].[2024-12-16]. https://auto.gasgoo.com/news/202403/26I70386681C103.shtml.
|
|
2023 financial report analysis of 20 international automotive parts companies[R/OL]. [2024-12-16]. https://auto.gasgoo.com/news/202403/26I70386681C103.shtml. (in Chinese)
|
| [5] |
赵轩, 王姝, 马建, 等. 分布式驱动电动汽车底盘集成控制技术综述[J]. 中国公路学报, 2023, 36(4): 221-248.
DOI
|
|
Zhao X, Wang S, Ma J, et al. Review of chassis integrated control technology for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2023, 36(4): 221-248. (in Chinese)
DOI
|
| [6] |
Sun X L, Fu J Q, Yang H Y, et al. An energy management strategy for plug-in hybrid electric vehicles based on deep learning and improved model predictive control[J]. Energy, 2023, 269, doi: 10.1016/j.energy.2023.126772.
|
| [7] |
余卓平, 史彪飞, 熊璐, 等. 基于分布式驱动电动汽车的再生制动策略设计及优化[J]. 同济大学学报(自然科学版), 2020, 48(11): 1620-1628.
|
|
Yu Z P, Shi B F, Xiong L, et al. Design and optimization of regenerative braking strategy based on distributed drive electric vehicle[J]. Journal of Tongji University (Natural Science), 2020, 48(11): 1620-1628. (in Chinese)
|
| [8] |
Shi X Y, Wang H, Cai Y F, et al. Two-stage auxiliary drifting path tracking control for distributed driving three-axle commercial vehicles[J]. ISA Transactions, 2024, 153: 404-419.
DOI
PMID
|
| [9] |
Han W, Xiong L, Yu Z P, et al. Integrated pressure estimation and control for electro-hydraulic brake systems of electric vehicles considering actuator characteristics and vehicle longitudinal dynamics[J]. IEEE/ASME Transactions on Mechatronics, 2022, 28(1): 197-209.
|
| [10] |
熊璐, 李聪聪, 卓桂荣, 等. 电子机械制动器构型及控制技术发展现状[J]. 汽车工程, 2023, 45(12): 2187-2199, 2250.
|
|
Xiong L, Li C C, Zhuo G R, et al. Review on electro-mechanical brake structure and control technology[J]. Automotive Engineering, 2023, 45(12): 2187-2199, 2250. (in Chinese)
|
| [11] |
Lu W Z, Yang C, Xia Y Q. Uncertainty-oriented optimal impedance control for EPS-human system with reliability evaluation[J]. Control Engineering Practice, 2024, 142, doi: 10.1016/j.conengprac.2023.105751.
|
| [12] |
Yang C, Gao Y P, Wang W D, et al. A synergistic predictive fusion control method and application for steering feel feedback of steer-by-wire system[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 293-310.
|
| [13] |
Zhang B, Zhao W Z, Luan Z K, et al. An antirollover control strategy based on time-varying nonlinear MPC for three-axle steering/braking-by-wire vehicle[J]. IEEE Transactions on Industrial Electronics, 2023, 71(9): 11048-11060.
|
| [14] |
Park J W, Yoo C M, Ham Y B, et al. Model-based design of a rear axle steering (RAS) system using an electro-hydraulic actuator (EHA)[J]. Journal of Mechanical Science and Technology, 2023, 37(12): 6205-6212.
|
| [15] |
Yuan Q, Zhou H L, Chen S L, et al. Designing a Switched Takagi-Sugeno Fuzzy controller for CDC semi-active suspensions with current input constraint[J]. Mechanical Systems and Signal Processing, 2023, doi: 10.1016/j.ymssp.2023.110450.
|
| [16] |
Kim J, Lee T, Kim C J, et al. Development of data-based model predictive control for continuous damping and air spring suspension system[J]. Control Engineering Practice, 2024, 142, doi: 10.1016/j.conengprac.2023.105777.
|
| [17] |
Azmi R, Mirzaei M, Habibzadeh-Sharif A. A novel optimal control strategy for regenerative active suspension system to enhance energy harvesting[J]. Energy Conversion and Management, 2023, 291, doi: 10.1016/j.enconman.2023.117277.
|
| [18] |
Xu X, Jiang X W, Chen L, et al. Semi-active control of a new quasi-zero stiffness air suspension for commercial vehicles based on event-triggered H∞ dynamic output feedback[J]. Nonlinear Dynamics, 2023, 111(13): 12161-12180.
|
| [19] |
Liu S S, Zhang L P, Liu Y F, et al. Motion posture control of corner module architecture intelligent electric vehicle on deep-potholed roads[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(6): 4480-4491.
|
| [20] |
Protean Electric. Protean 360+[EB/OL]. (2023-08-29)[2024-12-16]. https://www.proteanelectric.com/technology/#protean360plus.
|
| [21] |
BOSCH. Trends of future E/E-architectures[EB/OL]. (2019-03-31)[2024-12-16]. extension://idghocbbahafpfhjnfhpbfbmpegphmmp/assets/pdf/web/viewer.html?file=https%3A%2F%2Flink.springer.com%2Fcontent%2Fpdf%2F10.1007%2F978-3-658-25939-6_95.pdf
|
| [22] |
Xiao F, Hu J J, Zhu P X, et al. Chassis coordinated control based on ideal roll angle to improve vehicle stability[J]. Vehicle System Dynamics, 2023, 61(8): 2074-2102.
|
 ), LENG Bo1,†(
), LENG Bo1,†(