前瞻科技 ›› 2022, Vol. 1 ›› Issue (4): 18-39.DOI: 10.3981/j.issn.2097-0781.2022.04.002
龙腾1,2( ), 徐广通3, 曹严1,2, 周健4, 王祝5, 孙景亮1,2
), 徐广通3, 曹严1,2, 周健4, 王祝5, 孙景亮1,2
收稿日期:2022-10-24
修回日期:2022-11-16
出版日期:2022-12-20
发布日期:2023-01-17
作者简介:龙腾,北京理工大学长聘教授,博士研究生导师,国家“万人计划”青年拔尖人才。北京理工大学宇航学院党委书记兼常务副院长;中国宇航学会副秘书长、中国航空教育学会常务理事、“飞行器动力学与控制”教育部重点实验室主任、中央军委科学技术委员会某飞行器主题专家组成员、某集群装备项目副总设计师;中国兵工学会火箭导弹专业委员会委员、中国宇航学会飞行器任务规划专业委员会委员、中国指挥与控制学会集群智能与协同控制专业委员会委员;《北京理工大学学报》《战术导弹技术》《指挥与控制学报》、Space: Science & Technology等期刊编委。长期从事飞行器多学科设计优化、集群协同规划控制、跨域智能飞行器等领域的理论研究与技术攻关。获中国兵工学会青年科技奖、国防技术发明奖二等奖、航空科学基金优秀成果奖、中国机械工程学会优秀论文奖、CJA高影响力论文奖等。发表论文100余篇,获授权发明专利25项。电子信箱:tenglong@bit.edu.cn。
基金资助:
LONG Teng1,2(), XU Guangtong3, CAO Yan1,2, ZHOU Jian4, WANG Zhu5, SUN Jingliang1,2
Received:2022-10-24
Revised:2022-11-16
Online:2022-12-20
Published:2023-01-17
摘要:
任务规划技术是智能弹群遂行作战任务,实现协同作战,提升弹群自主化、智能化水平的重要技术保障。文章总结了智能弹群协同任务规划技术内涵与特点;从技术划代、项目验证、理论方法、软硬件环境及验证方法等方面,系统梳理弹群协同任务规划技术发展历程与现状。面向智能弹群实战化任务需求,重点从理论算法、自主可控软硬件、验证平台等方面,分析总结了弹群协同任务规划技术当前面临的挑战与未来研究方向。最后,提出了中国智能弹群协同任务规划技术的发展建议。
龙腾, 徐广通, 曹严, 周健, 王祝, 孙景亮. 智能弹群协同任务规划技术进展与展望[J]. 前瞻科技, 2022, 1(4): 18-39.
LONG Teng, XU Guangtong, CAO Yan, ZHOU Jian, WANG Zhu, SUN Jingliang. Review and Prospect on Cooperative Mission Planning Technology of Intelligent Munition Swarms[J]. Science and Technology Foresight, 2022, 1(4): 18-39.

图1 “小精灵”项目
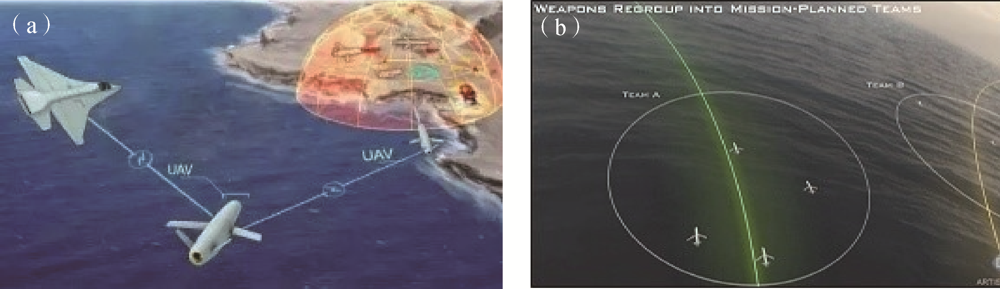
图2 “拒止环境协同作战”项目
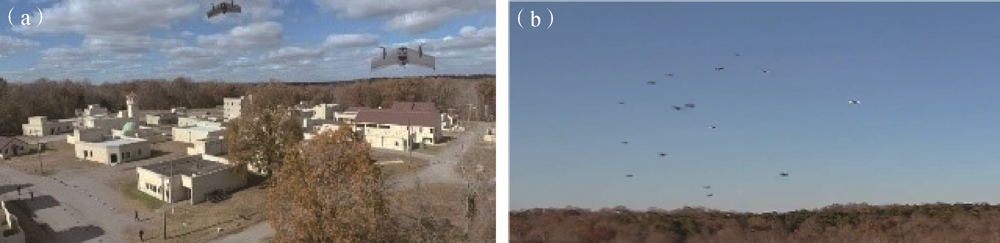
图3 “进攻性蜂群使能战术”项目

图4 “金帐汗国”自主协同攻击项目
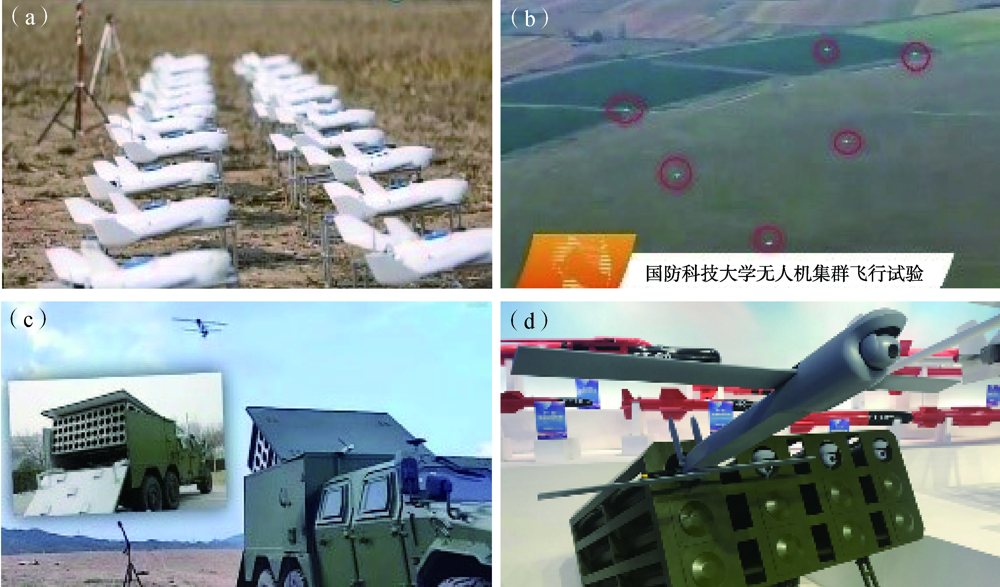
图5 国内典型无人机集群飞行试验
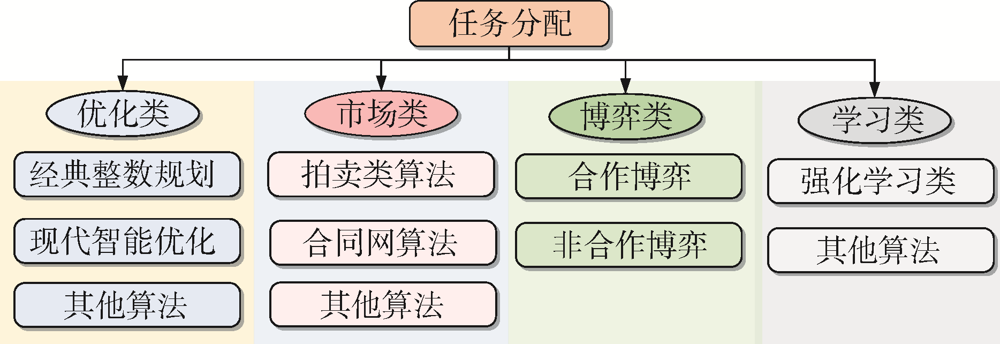
图6 任务分配方法分类
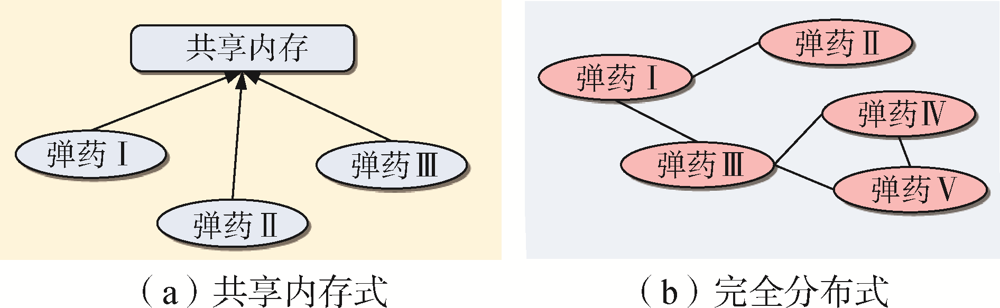
图7 网络拓扑结构
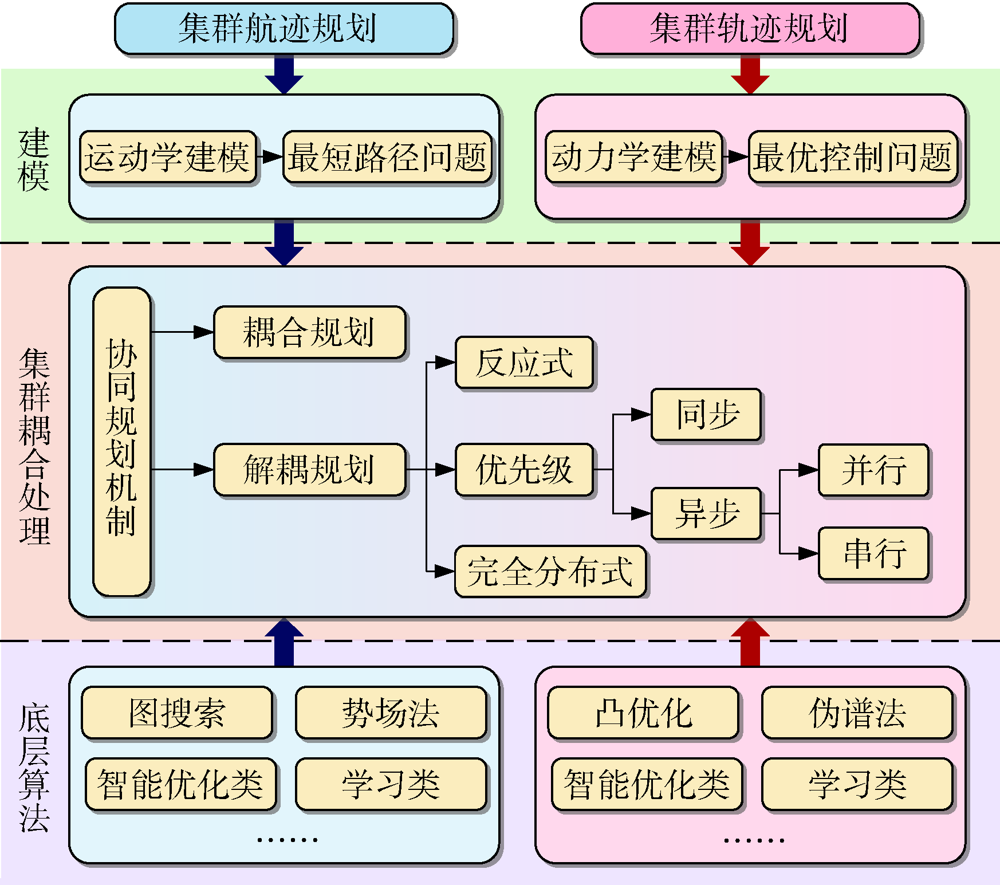
图8 集群航迹/轨迹规划技术
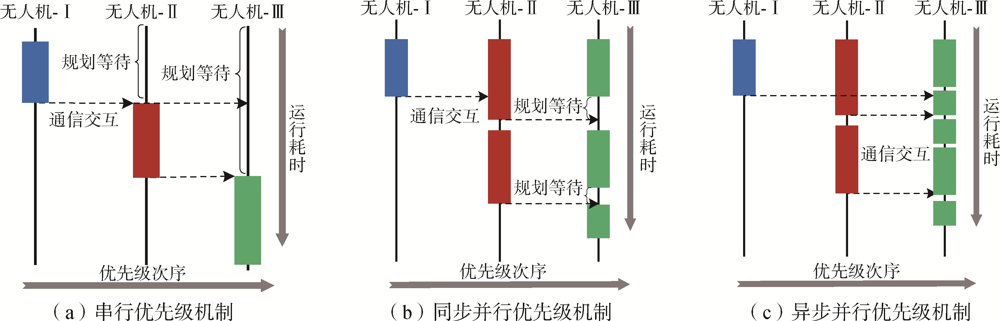
图9 典型的集群解耦规划机制
| 机载规划端机 | 性能参数 | 机载规划端机 | 性能参数 |
|---|---|---|---|
| 英伟达 Jetson TX1 | GPU: 256 CUDA Cores CPU: 4-core RAM:4 GB | 英特尔 Aero | CPU: Atom RAM: 4 GB |
| 英伟达 Jetson TX2 | GPU: 256 CUDA Cores CPU: 2-core, 4-core RAM: 4 GB | 英特尔 Edison | CPU: Atom 2-core RAM: 1 GB |
| 大疆妙算 | CPU: 4-core RAM: 2 GB | 哈德凯尔 ODROID-XU4 | CPU: 4-core RAM: 2 GB |
| 大疆妙算2 | Processor: NVIDIA Jetson TX2 RAM: 8 GB | 高通 Flight Pro | CPU: 4-core RAM: 2 GB |
| 英特尔 NUC | CPU: Core i3~i7 RAM: 8 GB, 16 GB | 树莓派 4B | CPU: 4-core RAM: 4 GB, 8 GB |
表1 当前用于科研试验的主流机载规划端机性能参数情况
| 机载规划端机 | 性能参数 | 机载规划端机 | 性能参数 |
|---|---|---|---|
| 英伟达 Jetson TX1 | GPU: 256 CUDA Cores CPU: 4-core RAM:4 GB | 英特尔 Aero | CPU: Atom RAM: 4 GB |
| 英伟达 Jetson TX2 | GPU: 256 CUDA Cores CPU: 2-core, 4-core RAM: 4 GB | 英特尔 Edison | CPU: Atom 2-core RAM: 1 GB |
| 大疆妙算 | CPU: 4-core RAM: 2 GB | 哈德凯尔 ODROID-XU4 | CPU: 4-core RAM: 2 GB |
| 大疆妙算2 | Processor: NVIDIA Jetson TX2 RAM: 8 GB | 高通 Flight Pro | CPU: 4-core RAM: 2 GB |
| 英特尔 NUC | CPU: Core i3~i7 RAM: 8 GB, 16 GB | 树莓派 4B | CPU: 4-core RAM: 4 GB, 8 GB |

图10 主流商用开发板
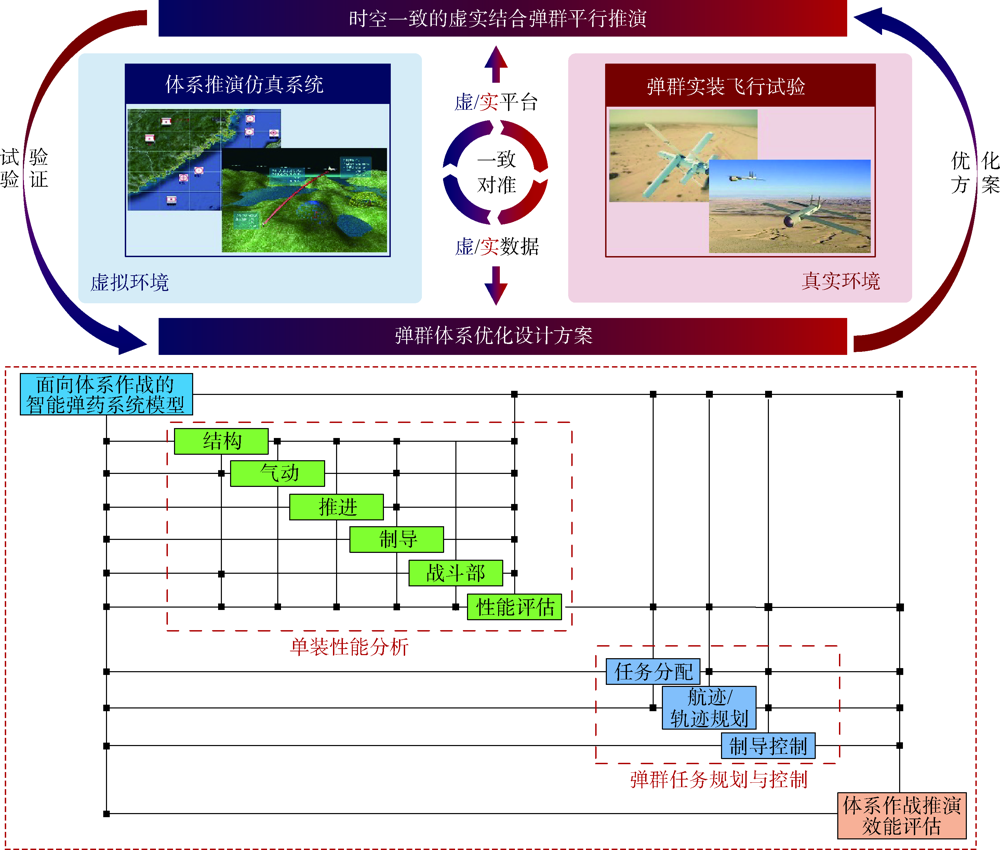
图11 虚实结合的智能弹群平行推演与体系设计
| [1] | 杨绍卿. 武器装备的新宠——智能弹药[J]. 科技导报, 2012, 30(16): 1. |
| [2] | 邹汝平, 孙静, 刘大卫, 等. 智能弹药集群协同作战关键技术研究[J]. 战术导弹技术, 2020(6): 1-6. |
| [3] | 李辉, 方丹, 高伟伟, 等. 巡飞弹蜂群关键技术与战术构想研究[J]. 战术导弹技术, 2020(4): 58-63. |
| [4] | 张延风, 张士峰, 周建, 等. 陆军精确打击火力发展研究[J]. 弹箭与制导学报, 2019, 39(4): 69-72. |
| [5] |
沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3): 593-606.
DOI |
| [6] | AN/TYQ-77 Aviation mission planning system (AMPS)[EB/OL]. (2011-07-07)[2022-06-14]. https://www.globalsecurity.org/military/systems/aircraft/systems/an-tyq-77.htm. |
| [7] | Leavitt C A. Real-time in-flight planning[C]// Proceedings of the IEEE National Aerospace and Electronics Conference. Piscataway: IEEE Press, 1996. |
| [8] | “小精灵”项目: 美军增加第四阶段工作, 聚焦作战能力模拟演示![EB/OL].(2020-09-14)[2022-06-14]. https://www163com/dy/article/FMGSITBO0511DV4Hhtml. |
| [9] | 李磊, 王彤, 蒋琪. 美国CODE项目推进分布式协同作战发展[J]. 无人系统技术, 2018, 1(3): 59-66. |
| [10] | “进攻性蜂群使能战术(OFFSET)”项目: 未来战场“人类+蜂群”协同作战[EB/OL]. (2021-05-04)[2022-06-14]. https://wwwsohucom/na/464452579_358040. |
| [11] | 下一代智能弹药: 美军“金帐汗国”弹药蜂群项目概况[EB/OL]. (2021-07-26)[2022-06-14]. https://milnewssinacomcn/world/2021-07-26/doc-ikqcfnca9089277shtml. |
| [12] | 119架!中国再次刷新固定翼无人机集群试验纪录[EB/OL]. (2017-06-10)[2022-06-14]. http://mthepapercn/quickApp_jumpjsp?contid=1705747. |
| [13] | 后来居上,中国无人机“蜂群”攻击技术快速发展[EB/OL]. (2020-10-22)[2022-06-14]. https://www163com/war/article/FPHNFE5U000181KThtml. |
| [14] |
Gerkey B P, Matarić M J. A formal analysis and taxonomy of task allocation in multi-robot systems[J]. The International Journal of Robotics Research, 2004, 23(9): 939-954.
DOI URL |
| [15] | Ye F, Chen J, Tian Y, et al. Cooperative multiple task assignment of heterogeneous uavs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy[J]. Journal of Intelligent & Robotic Systems, 2020, 100(2): 615-627. |
| [16] | Skaltsis G M, Shin H S, Tsourdos A. A survey of task allocation techniques in MAS[C]// 2021 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2021. |
| [17] | Samiei A, Ismail S, Sun L. Cluster-based hungarian approach to task allocation for unmanned aerial vehicles[C]// 2019 IEEE National Aerospace and Electronics Conference (NAECON). Piscataway: IEEE Press, 2019. |
| [18] | Xu G T, Li L, Long T, et al. Cooperative multiple task assignment considering precedence constraints using multi-chromosome encoded genetic algorithm[C]// Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2018. |
| [19] | Zavlanos M M, Spesivtsev L, Pappas G J. A distributed auction algorithm for the assignment problem[C]// 2008 47th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2008. |
| [20] |
Castañon D D. Parallel synchronous and asynchronous[J]. Parallel Computing, 1991, 17(6-7): 707-732.
DOI URL |
| [21] |
Choi H L, Brunet L, How J P. Consensus-based decentralized auctions for robust task allocation[J]. IEEE Transactions on Robotics, 2009, 25(4): 912-926.
DOI URL |
| [22] | Johnson L, Ponda S, Choi H L, et al. Improving the efficiency of a decentralized tasking algorithm for uav teams with asynchronous communications[C]// Proceedings of the AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010. |
| [23] | 刘刚, 王瑛, 张发, 等. 合同网协议协商机制收敛性与收敛速率分析[J]. 控制与决策, 2014, 29(6): 1027-1034. |
| [24] | Johnson L, Choi H L, How J P. The hybrid information and plan consensus algorithm with imperfect situational awareness[M]//Distributed Autonomous Robotic Systems. Berlin: Springer, 2016: 221-233. |
| [25] |
Zhao W, Meng Q, Chung P W. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario[J]. IEEE Transactions on Cybernetics, 2015, 46(4): 902-915.
DOI URL |
| [26] | Mazdin P, Rinner B. Distributed and communication-aware coalition formation and task assignment in multi-robot systems[J]. IEEE Access, 2021(9): 35088-35100. |
| [27] | 符小卫, 冯鹏, 高晓光, 等. 通信延迟约束下多无人机任务指派冲突消解[J]. 系统工程与电子技术, 2018, 40(7): 1491-1497. |
| [28] | Wang N, Li Z, Liang X, et al. Cooperative target search of UAV swarm with communication distance constraint[J]. Mathematical Problems in Engineering, 2021(5): 1-14. |
| [29] |
Otte M, Kuhlman M J, Sofge D. Auctions for multi-robot task allocation in communication limited environments[J]. Autonomous Robots, 2020, 44(3): 547-584.
DOI URL |
| [30] | Szczerba R J. New cell decomposition techniques for planning optimal paths[D]. Notre Dame: University of Notre Dame, 1996. |
| [31] | 穆中林, 鲁艺, 任波, 等. 基于改进A*算法的无人机航路规划方法研究[J]. 弹箭与制导学报, 2007(1): 297-300. |
| [32] | Richards A, How J. Decentralized model predictive control of cooperating UAVs[C]// 2004 43rd IEEE Conference on Decision and Control (CDC). Piscataway: IEEE Press, 2005. |
| [33] | Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. |
| [34] | 杨萌, 王玥. 基于改进人工势场法的无人机避让航迹规划[J]. 导航与控制, 2019, 18(1): 76-83. |
| [35] |
Lin C, Li Y, Aouf N. Potential-field-based evolutionary route planner for the control of multiple unmanned aerial vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2010, 224(11): 1229-1242.
DOI URL |
| [36] | 卢艳军, 李月茹. 基于改进人工势场法的四旋翼飞行器航迹规划[J]. 火力与指挥控制, 2018, 43(11): 119-122. |
| [37] | Allaire F O C J, Tarbouchi M, Labonté G, et al. Fpga implementation of genetic algorithm for UAV real-time path planning[J]. Journal of Intelligent & Robotic Systems, 2009, 54(1-3): 495-510. |
| [38] | Jennings A L, Ordonez R, Ceccarelli N. An ant colony optimization using training data applied to UAV way point path planning in wind[C]// 2008 IEEE Swarm Intelligence Symposium. Piscataway: IEEE Press, 2008. |
| [39] | 于成龙, 刘莉, 王祝, 等. 基于物理规划的无人机多目标航迹规划[J]. 电光与控制, 2014, 21(5): 1-5. |
| [40] | Foo J L, Knutzon J, Kalivarapu V, et al. Path planning of unmanned aerial vehicles using B-splines and particle swarm optimization[J]. Journal of Aerospace Computing Information & Communication, 2009, 6(4): 271-290. |
| [41] | 黄国强, 陆宇平, 南英. 飞行器轨迹优化数值算法综述[J]. 中国科学: 技术科学, 2012, 42(9): 1016-1036. |
| [42] |
Kamyar R, Taheri E. Aircraft optimal terrain/threat-based trajectory planning and control[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 466-483.
DOI URL |
| [43] | 陈家照, 张中位, 徐福后. 改进的概率路径图法[J]. 计算机工程与应用, 2009, 45(10): 54-55. |
| [44] |
Desaraju V R, How J P. Decentralized path planning for multi-agent teams with complex constraints[J]. Autonomous Robots, 2012, 32(4): 385-403.
DOI URL |
| [45] |
Marchidan A, Bakolas E. Collision avoidance for an unmanned aerial vehicle in the presence of static and moving obstacles[J]. Journal of Guidance Control and Dynamics, 2020, 43(1): 96-110.
DOI URL |
| [46] |
Hönig W, Preiss J A, Kumar T S, et al. Trajectory planning for quadrotor swarms[J]. IEEE Transactions on Robotics, 2018, 34(4): 856-869.
DOI URL |
| [47] |
Ding W, Gao W, Wang K, et al. An efficient B-spline-based kinodynamic replanning framework for quadrotors[J]. IEEE Transactions on Robotics, 2019, 35(6): 1287-1306.
DOI URL |
| [48] | Richards A, How J P. Aircraft trajectory planning with collision avoidance using mixed integer linear programming[C]// Proceedings of the 2002 American Control Conference. Piscataway: IEEE Press, 2002. |
| [49] |
Delkhosh M, Parand K. Generalized pseudospectral method: Theory and applications[J]. Journal of Computational Science, 2019, 34: 11-32.
DOI |
| [50] |
Luis C E, Schoellig A P. Trajectory generation for multiagent point-to-point transitions via distributed model predictive control[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 375-382.
DOI URL |
| [51] |
Karelahti J, Virtanen K, Öström J. Automated generation of realistic near-optimal aircraft trajectories[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(3): 674-688.
DOI URL |
| [52] | 白瑞光, 孙鑫, 陈秋双, 等. 基于Gauss伪谱法的多UAV协同航迹规划[J]. 宇航学报, 2014, 35(9): 1022-1029. |
| [53] | 张煜, 张万鹏, 陈璟, 等. 基于Gauss伪谱法的UCAV对地攻击武器投放轨迹规划[J]. 航空学报, 2011, 32(7): 1240-1251. |
| [54] | Shao S, He C, Zhao Y, et al. Efficient trajectory planning for UAVs using hierarchical optimization[J]. IEEE Access, 2021(9): 60668-60681. |
| [55] |
Malyuta D, Yu Y, Elango P, et al. Advances in trajectory optimization for space vehicle control[J]. Annual Reviews in Control, 2021, 52: 282-315.
DOI URL |
| [56] |
Tillerson M, Inalhan G, How J P. Coordination and control of distributed spacecraft systems using convex optimization techniques[J]. International Journal of Robust and Nonlinear Control, 2002, 12(2): 207-242.
DOI URL |
| [57] |
Eren U, Dueri D, Açıkmeşe B. Constrained reachability and controllability sets for planetary precision landing via convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(11): 2067-2083.
DOI URL |
| [58] | 刘哲, 陆浩然, 郑伟, 等. 多滑翔飞行器时间协同轨迹快速规划[J]. 航空学报, 2021, 42(11): 317-331. |
| [59] | Alonso-Mora J. Collaborative motion planning for multi-agent systems[D]. Zurich: Swiss Federal Institute of Technology Zurich, 2014. |
| [60] |
Zhang Z, Li J, Wang J. Sequential convex programming for nonlinear optimal control problems in UAV path planning[J]. Aerospace Science and Technology, 2018, 76: 280-290.
DOI URL |
| [61] |
Vinyals O, Babuschkin I, Czarnecki W M, et al. Grandmaster level in starcraft ii using multi-agent reinforcement learning[J]. Nature, 2019, 575(7782): 350-354.
DOI URL |
| [62] |
Loquercio A, Kaufmann E, Ranftl R, et al. Learning high-speed flight in the wild[J]. Science Robotics, 2021, doi: 10.1126/scirobotics.abg5810.
DOI |
| [63] |
Shi G, Hönig W, Shi X, et al. Neural-swarm2: Planning and control of heterogeneous multirotor swarms using learned interactions[J]. IEEE Transactions on Robotics, 2021, 38(2): 1063-1079.
DOI URL |
| [64] |
Long P, Liu W, Pan J. Deep-learned collision avoidance policy for distributed multiagent navigation[J]. IEEE Robotics Automation Letters, 2017, 2(2): 656-663.
DOI URL |
| [65] | Everett M, Chen Y F, How J P. Collision avoidance in pedestrian-rich environments with deep reinforcement learning[J]. IEEE Access, 2021(9): 10357-10377. |
| [66] |
Cap M, Novak P, Kleiner A, et al. Prioritized planning algorithms for trajectory coordination of multiple mobile robots[J]. IEEE Transactions on Automation Science and Engineering, 2015, 12(3): 835-849.
DOI URL |
| [67] |
Morgan D, Subramanian G P, Chung S J, et al. Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming[J]. The International Journal of Robotics Research, 2016, 35(10): 1261-1285.
DOI URL |
| [68] |
Morgan D, Chung S J, Hadaegh F Y. Model predictive control of swarms of spacecraft using sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(6): 1725-1740.
DOI URL |
| [69] | Berg J V D, Guy S J, Lin M, et al. Reciprocal n-body collision avoidance[C]// 14th International Symposium of Robotic Research. Berlin:Springer, 2011. |
| [70] | Berg J P V D, Lin M C, Manocha D. Reciprocal velocity obstacles for real-time multi-agent navigation[C]// 2008 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2008. |
| [71] | Chen Y, Cutler M, How J P. Decoupled multiagent path planning via incremental sequential convex programming[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2015. |
| [72] | Berg J P V D, Overmars M H. Prioritized motion planning for multiple robots[C]// 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2005. |
| [73] | Velagapudi P, Sycara K, Scerri P. Decentralized prioritized planning in large multirobot teams[C]// 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2010. |
| [74] |
Yu W, Peng J, Zhang X, et al. A cooperative path planning algorithm for a multiple mobile robot system in a dynamic environment[J]. International Journal of Advanced Robotic Systems, 2014, 11(8): 136.
DOI URL |
| [75] |
Liu S, Sun D, Zhu C. A dynamic priority based path planning for cooperation of multiple mobile robots in formation forming[J]. Robotics Computer-Integrated Manufacturing, 2014, 30(6): 589-596.
DOI URL |
| [76] |
Mayne D Q, Rawlings J B, Rao C V, et al. Constrained model predictive control: Stability and optimality[J]. Automatica, 2000, 36(6): 789-814.
DOI URL |
| [77] |
Eren U, Prach A, Koçer B B, et al. Model predictive control in aerospace systems: Current state and opportunities[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(7): 1541-1566.
DOI URL |
| [78] | Negenborn R R, Maestre J M. Distributed model predictive control: An overview and roadmap of future research opportunities[J]. IEEE Control Systems Magazine, 2014, 34(4): 87-97. |
| [79] | 曾剑新, 周焰, 何彦杰. 一种飞行器在线航路重规划方法[J]. 空军雷达学院学报, 2010, 24(5): 333-336. |
| [80] | Lowe R, Wu Y, Tamar A, et al. Multi-agent actor-critic for mixedcooperative-competitive environments[C]// Proceedings of the 31st International Annual Conference on Neural Information Processing Systems. Red Hook: Curran Associates Corporation, 2017. |
| [81] | 孙鑫, 陈晓东, 严江江. 国外任务规划系统发展[J]. 指挥与控制学报, 2018, 4(1): 8-14. |
| [82] | Gonzales D R. Evolution of the air campaign planning process and the contingency theater automated planning system (ctaps)[R]. Santa Monica: RAND Corporation, 1996. |
| [83] | Sarkar S. Intelligent energy-efficient drones: Path planning, real-time monitoring and decision-making[D]. Lafayette: University of Louisiana at Lafayette, 2021. |
| [84] | Xu H, Wang L, Zhang Y, et al. Decentralized visual-inertial-UWB fusion for relative state estimation of aerial swarm[C]// 2020 IEEE international conference on robotics and automation (ICRA). Piscataway: IEEE Press, 2020. |
| [85] | Lundberg C L, Sevil H E, Das A. A visualsfm based rapid 3-D modeling framework using swarm of UAVs[C]// 2018 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2018. |
| [86] | Tordesillas J, Lopez B T, Carter J, et al. Real-time planning with multi-fidelity models for agile flights in unknown environments[C]// 2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2019. |
| [87] | 吕隽, 孔文华, 李景. 国外战术导弹半实物仿真试验验证能力发展分析[J]. 战术导弹技术, 2020(2): 99-104. |
| [88] |
Gao F, Wang L, Zhou B, et al. Teach-repeat-replan: A complete and robust system for aggressive flight in complex environments[J]. IEEE Transactions on Robotics, 2020, 36(5): 1526-1545.
DOI URL |
| [89] |
Gao F, Wu W, Gao W, et al. Flying on point clouds: Online trajectory generation and autonomous navigation for quadrotors in cluttered environments[J]. Journal of Field Robotics, 2019, 36: 710-733.
DOI URL |
| [90] |
Bandyopadhyay S, Chung S, Hadaegh F Y. Probabilistic and distributed control of a large-scale swarm of autonomous agents[J]. IEEE Transactions on Robotics, 2017, 33(5): 1103-1123.
DOI URL |
| [91] |
Gareri J, Ballard G, Morris J, et al. Application of scene projection technologies at the AMRDEC SSDD HWIL facilities[C].Proceedings of SPIE, Technologies for Synthetic Environments:Hardware-in-the-Loop XVII, 83560L. Bellingham: SPIE, 2012, doi: 10.1117/12.923071.
DOI |
| [92] | 相晓嘉, 闫超, 王菖, 等. 基于深度强化学习的固定翼无人机编队协调控制方法[J]. 航空学报, 2021, 42(4): 420-433. |
| [93] | Ure N K, Chowdhary G, Chen Y F, et al. Distributed learning for planning under uncertainty problems with heterogeneous teams[J]. Journal of Intelligent & Robotic Systems, 2014, 74(1): 529-544. |
| [94] |
Hönig W, Preiss J A, Kumar T K S, et al. Trajectory planning for quadrotor swarms[J]. IEEE Transactions on Robotics, 2018, 34(4): 856-869.
DOI URL |
| [95] | 燕清锋, 肖宇波, 杨建明. 美军无人机蜂群作战探析[J]. 飞航导弹, 2017(10): 49-53. |
| [96] | 刘丽, 王森, 胡然. 美军主要无人机集群项目发展浅析[J]. 飞航导弹, 2018(7): 37-43. |
| [97] | 毛少杰, 周芳, 楚威, 等. 面向指挥决策支持的平行仿真系统研究[J]. 指挥与控制学报, 2016, 2(4): 315-321. |
| [98] | 周芳, 毛少杰, 吴云超, 等. 实时态势数据驱动的平行仿真推演方法[J]. 中国电子科学研究院学报, 2020, 15(4): 323-328. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||




京公网安备 11010802038735号

